
東京大学大学院・新領域創成科学研究科の藤本博志准教授らの研究グループは3月30日、千葉県柏市の東京大学柏キャンパスで、東洋電機製造株式会社、日本精工株式会社と共同で(以下,研究グループ)、道路からIWMに直接、走行中給電できる「第2世代ワイヤレスインホイールモータ」を開発し、世界で初めて実車での走行に成功したと発表した。

これは2015年5月に発表した、車体からIWMへワイヤレス給電する技術をさらに発展させたもの。
世界初となった同技術は、道路に設置したコイルから走行中の車のIWMへ磁界共振結合方式でワイヤレス給電するかたち。

従来の走行中給電技術の多くは、道路のコイルから車体へワイヤレス給電するものだったが、新技術では道路からIWMに直接給電できるため効率が良くなる。
併せてこれを実現するため、IWMにリチウムイオンキャパシタを内蔵するとともに、高度なエネルギーマネジメント技術を開発した。

研究背景と開発の経緯
クルマのホイール内部に駆動モータを配置するIWMタイプの電気自動車(EV: Electric Vehicle)は、その優れた運動性能により、安全性、環境性、快適性のあらゆる面でメリットを享受できる。
しかし、従来のIWMではモータを駆動する電力を送るため、車体とIWMをワイヤでつなぐ必要があり、このワイヤが断線するリスクがあった。
そこで、去る2015年5月に当研究グループは、「ワイヤが断線する恐れがあるならば、そのワイヤをなくしてしまおう」のコンセプトで第1世代ワイヤレスIWMを開発し、世界で初めて実車走行に成功した。
一方で、EVの普及が進んでいない一番の課題は、従来のガソリン車等に比べ充電1回あたりの航続距離が短いことにある。
航続距離を伸ばすため重いバッテリをクルマにたくさん積むと、クルマを動かすのに必要なエネルギーが増えてしまう。
そこで、バッテリの搭載量は必要最小限にして、走行中に足りない分のエネルギーを道路に設けたコイルからワイヤレスで送って補えば良い、という「走行中給電」の実現に向けて、世界的に多くの研究が行われている。
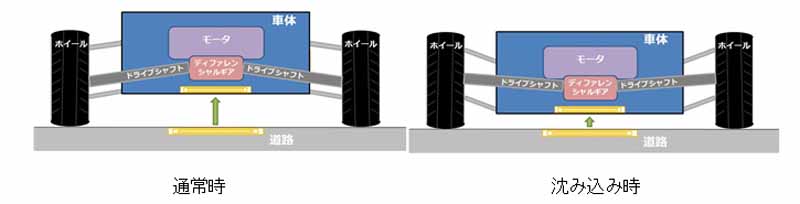
ただし、これまで検討されてきた走行中給電の多くは、道路に設けたコイルから車体の底に装着した受電コイルに電力を送り、車載バッテリへ給電をするものだった。

上記のこうした研究例では、現在市販されているEVと同様の車載モータを使ったEVを想定しており、ディファレンシャルギアなどの駆動装置を介するため機械的な伝達ロスが大きく、重量も重くなってしまう。
これに比べ、IWMは発生したトルクを直接駆動力としてタイヤに伝達できるので、伝達ロスを極限まで減らせる。また、先行研究において、駆動装置の重量を30~40%軽くできることが示されていたのも研究会開発を進める大きな動機となった。
そこで同研究では、IWMに適した走行中給電の新しいかたちを提案した。
つまり、道路のコイルから車体のコイルへの給電ではなく、道路のコイルからIWMに直接、走行中ワイヤレス給電を行う。これにより安全性、環境性、快適性に優れる未来のEVの理想形を実現する形だ。
3つの技術的なキーポイント
1.道路から走行中のクルマのIWMへの直接ワイヤレス給電
道路からの走行中給電では道路のコイルとクルマの受電コイルの相対位置が走行状況によって変化するため、送受電コイルの位置ずれに強い磁界共振結合による方式を採用した。
これまで検討されてきた車体の受電コイルへの走行中給電では、路面の凹凸や乗車人数等よって受電コイルの位置が上下するため、受電コイルを道路に擦らないようにエアギャップ(コイルの間の距離)を広くする必要があり、効率の低下を招く。
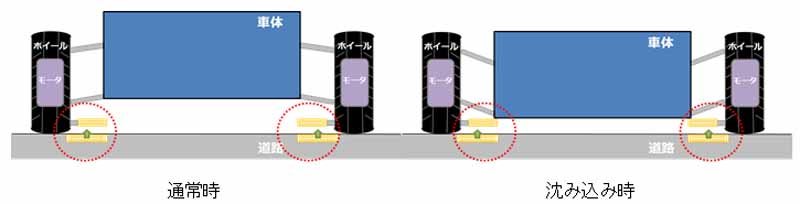
一方、本研究で提案する構造ではIWMに受電コイルを装着するので、車体(サスペンションよりも上の部分)に上下運動が生じたとしても、道路と受電コイルとの距離は一定に保たれるので、エアギャップの余裕を大きくする必要がある。
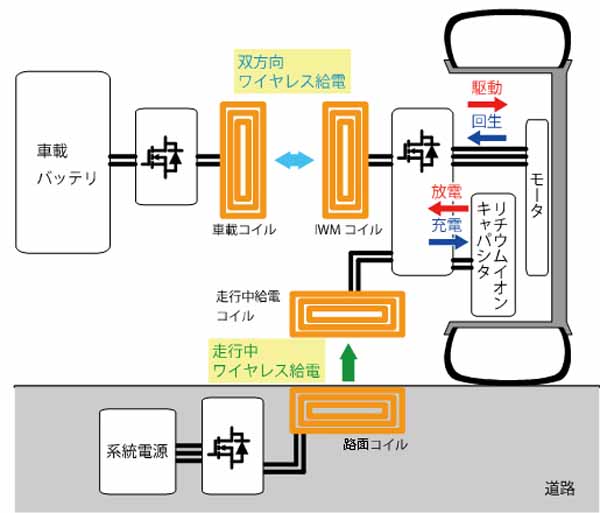
なお、走行中給電設備がない場合は、車載バッテリからワイヤレスでIWMにエネルギーを送ってIWMを駆動する。
これは2015年に発表した第1世代ワイヤレスIWMで実現されている技術であり、今回開発した第2世代でも同じ機能を持っている。
2.IWMに蓄電デバイスを内蔵したことによる高効率動作
従来のガソリン車等と違いEVは減速時のエネルギーを回収できる(回生ブレーキ)。さらに走行中給電が加わると、IWMではエネルギーの出し入れが頻繁に行われる。
そこで、IWMに蓄電デバイスを内蔵することで安定的な動作と高効率化を可能とした。エネルギーの出し入れが頻繁に行われる用途では、蓄電デバイスとしてバッテリは適していないことが一般に知られている。
そこで本研究では大電力を扱うことができ、充放電回数が多くても劣化しにくいリチウムイオンキャパシタを採用した。
2015年に発表した第1世代ワイヤレスIWMでは、EVの減速時の回生エネルギーをIWMから車載バッテリにワイヤレスで送って充電しており、回生でのエネルギーロスが生じていた。
今回開発した第2世代ではIWMに内蔵した蓄電デバイスに回生エネルギーを貯められるのでエネルギーのロスを低減でき、車載バッテリの容量を更に減らすことが出来る。
このようにIWMに出入りするエネルギーの流れをコントロールし、内蔵した蓄電デバイスを適切に使用するための高度なエネルギーマネジメント技術を開発した。
3.1輪あたりのモータ出力を3kWから12kWへ大幅に大出力化
2015年に発表した第1世代ワイヤレスIWMでは1輪あたりの出力は最大3.3kWと市販のEVに比べて限られた性能だった。
そこで今回開発した第2世代では市販EVと同等の走行性能を得ることを目標に、1輪あたりの出力を12kWに大幅に大出力化した。
現在は実験車両の前輪2輪のみ装着していますが、4輪すべてに装着すると48kWとなり、実験車両のベースである市販EVと同等の走行性能が得られる。
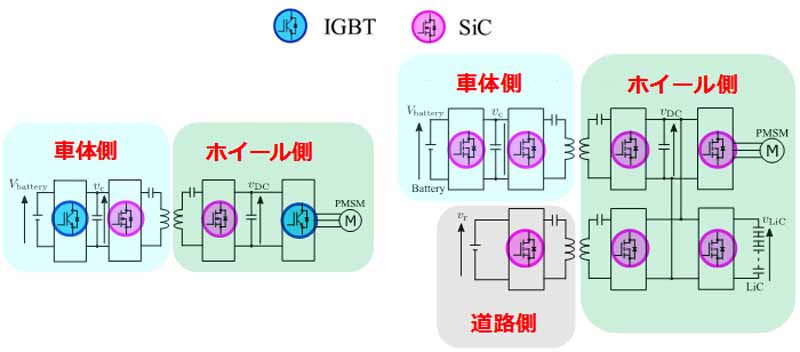
そこで大出力化にあたり、ワイヤレス給電を構成する変換器全てにSiCを採用した。
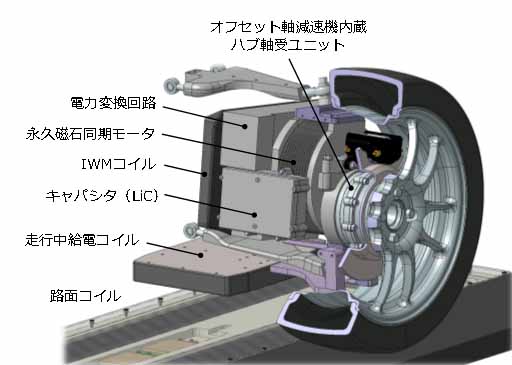
また、モータの回転軸とホイールの回転軸をずらした新しい構造のオフセット軸減速機を内蔵したハブ軸受ユニットを採用することで小型化を実現し、操舵機構があり寸法的な制約の厳しい前輪への搭載が可能となった。
個々のモータは大出力化した一方で、IWMへの走行中給電では個々のモータがそれぞれ電力を受け取れるので、車載バッテリに走行中給電する方法に比べ、1つの道路側コイルから送る電力は小さくすることができる(4輪に装備した場合はそれぞれ1/4の電力でよい)。これにより道路側設備の簡易化にもつながる。
今後の展望
走行中給電はEVの課題である航続距離の短さを解決できる。例えば、高速道路において走行中給電で得たエネルギーのみで走行したり、車載バッテリを充電しながら走行できる。
また、市街地の信号のある交差点付近で給電してIWMにエネルギーを蓄え、発進時の加速エネルギーとして使う、といった方法が考えられる。
さらに、路線バスや空港・工場といった決まったルートに走行中給電設備を設置して、このルートを走行する車両のバッテリ搭載量を大幅に減らすことも可能だと云う。

2015年に発表した第1世代ワイヤレスIWMではIWMのワイヤの断線リスクという弱点を克服。今回開発した第2世代ワイヤレスIWMでは、それに加えて走行中給電の新しいかたちを提案し実現した。
研究グループでは、「これらの技術がIWMの普及・実用化の大きな後押しとなり、究極のEVとしてクルマ社会の安全・安心や、地球環境の保全に貢献することを期待している」と結んでいる。
発表学会
・テクノフロンティア モータ技術シンポジウム(2017年4月19日予定)
「走行中給電に対応したワイヤレス インホールモータ2号機の開発」
藤本 博志
・自動車技術会春季大会(2017年5月24日予定)
「走行中ワイヤレス電力伝送に対応したワイヤレスインホイールモータ2号機の開発」
藤本 博志、竹内 琢磨、畑 勝裕、居村 岳広、佐藤 基、郡司 大輔