

国土交通省は日本国内の自動走行について、国際競争力を確保し、世界の交通事故の削減等に貢献することを目的に平成27年2月から経済産業省と共同で「自動走行ビジネス検討会」を開催している。今3月23日、その自動走行の実現に向けた今後の取組方針等を公表した。
強調分野と取り組み方針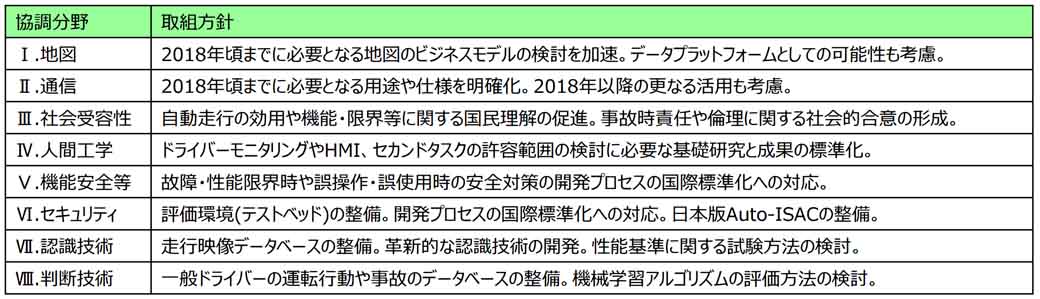
【報告書の概要】
2020~2030年頃に実用化を目指す自動走行の将来像
- 早ければ2018年までに、高速道路での自動走行レベル2(自動分合流)を実現する。
- 2020年頃より、専用駐車場等での自動バレーパーキング(専用空間レベル4(完全自動走行))を実現する。
- 2020年以降に、夜間長距離輸送等における後続車両無人の隊列走行を実現する。
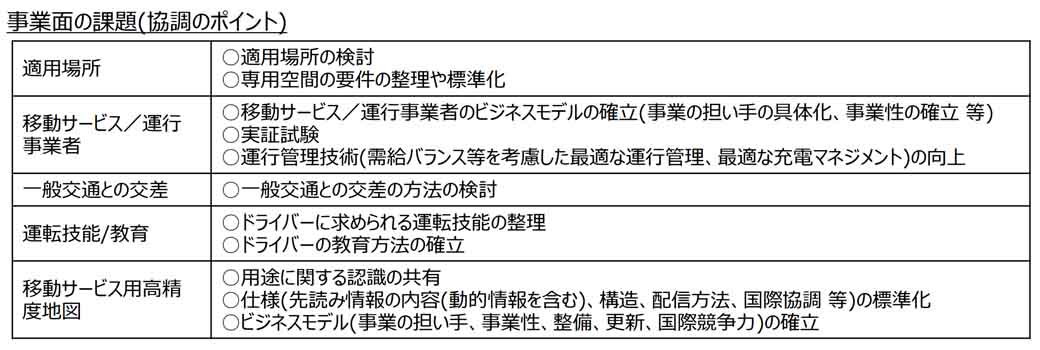
- ラストワンマイル自動走行(専用空間等 専用車両 レベル4)に関しては、レベル4の専用空間等での走行から検討を開始し、一般交通との混在は、実証実験実施者等幅広い関係者が共有できる将来像の明確化を進めていく。
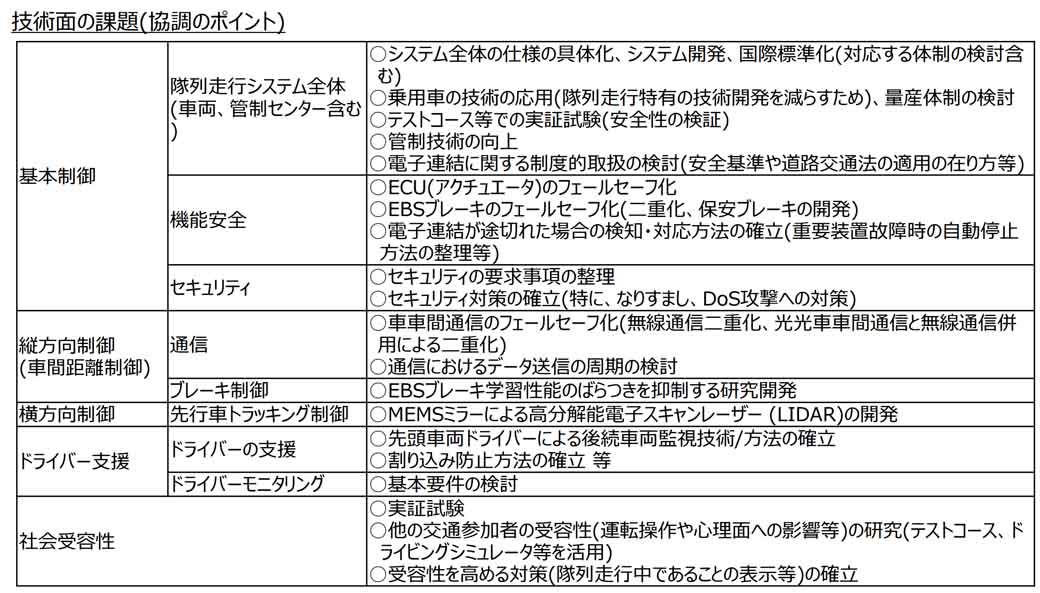
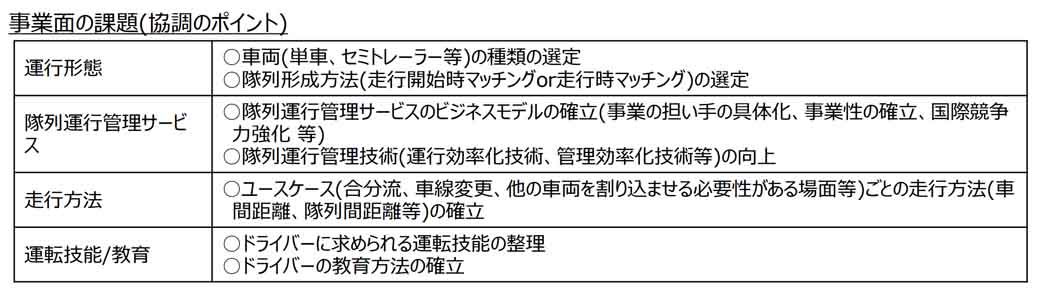
隊列走行(トラック レベル2)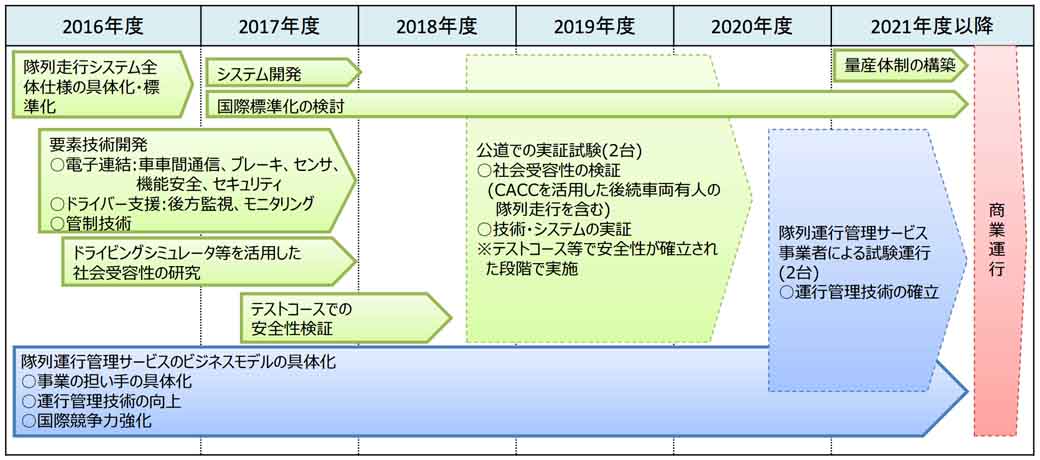
自動バレーパーキング(占有空間 一般車両 レベル4)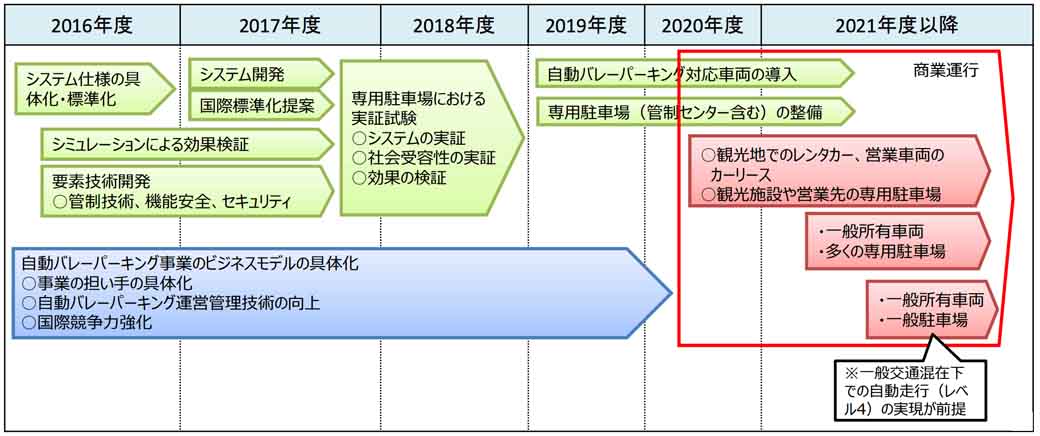
ラストワンマイル自動走行(専用空間等 専用車両 レベル4)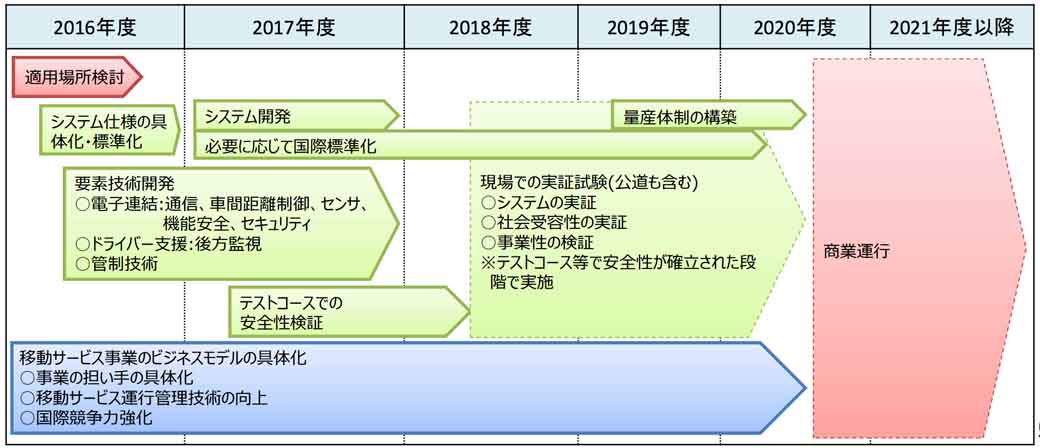
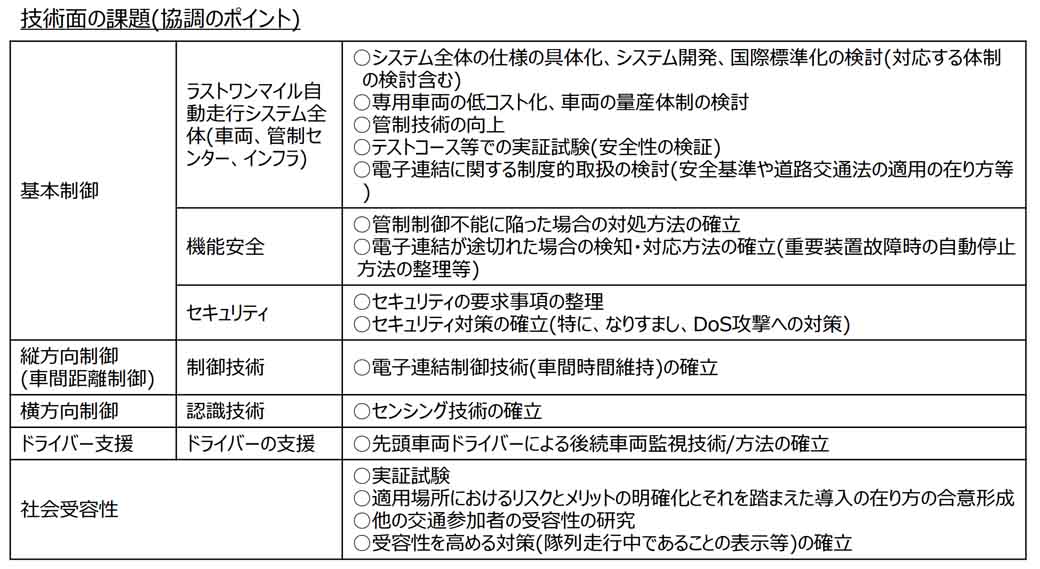
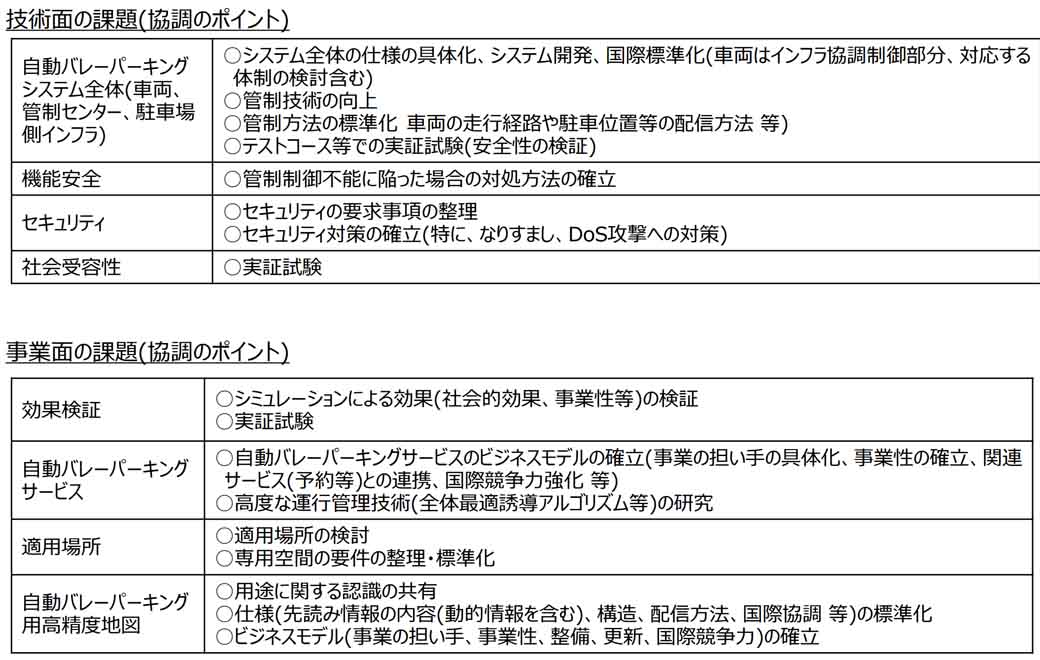
【戦略的な協調領域の取り組み方針】
- 産学官が連携して取り組むべき重要な協調領域とし、国が主導して検討を推進していく。
- 協調領域となる8分野:地図、通信、社会受容性、人間工学、機能安全等、セキュリティ、認識技術、判断技術に注力していく。
- 自動走行技術を活用したビジネスモデルの具体化を進めると共に、実証実験等を通じた研究開発を推進しいていく。
【国際的なルール(基準・標準)への戦略的取組】
- 日本が国際的なルール作りの中心となるよう、基準・標準の連携を深めていく。
【産学連携の促進】
- 高度な自動走行の実現に向けて学(大学)の担うべき役割や分野について引き続き議論を進めていく。
『今後の取組方針』の本文の入手方法
・国交省自動車局ホームページ
< http://www.mlit.go.jp/jidosha/jidosha_tk7_000015.html >