

株式会社富士通研究所(本社:川崎市中原区、代表取締役社長:佐々木繁)は2018年1月24日、車載ネットワークに於けるサイバー攻撃を検知する技術を開発した。
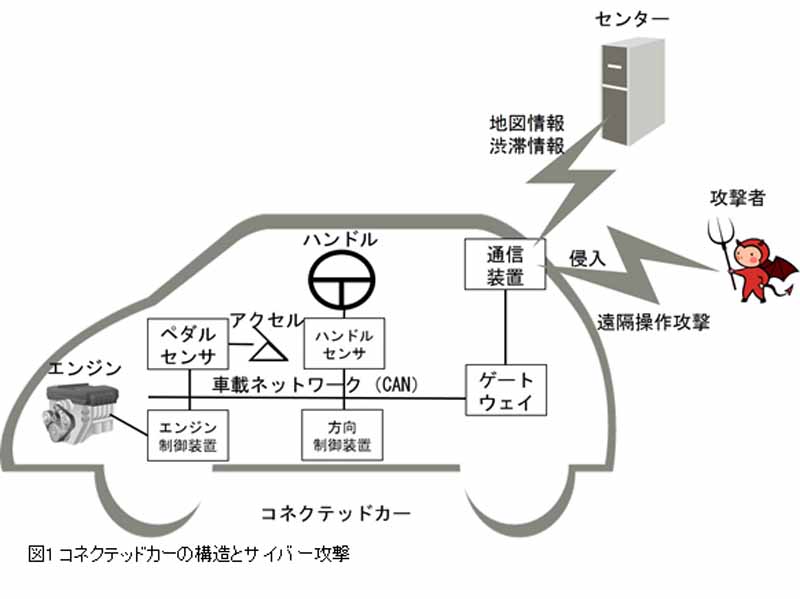
昨今、自動車業界では繫がるクルマである「コネクテッドカー」の存在が、ごく普通のものとなっている。しかしコネクテッドカーは外部からの遠隔操作や、社債システム上の特定部位を狙う攻撃の危険性が指摘されており、このため車内への第三者からの進入をリアルタイムに検知する必要がある。
一般的に自動車は、CAN(Controller Area Network)と呼ばれる車載ネットワークにCANメッセージを送ることで、ボディや走行の動作を制御する。
この際、外部からの侵入者が遠隔操作による攻撃を行う場合、まずは外部との通信装置やゲートウェイを乗っ取り、悪意あるCANメッセージを送信する。
この結果ドライバーの意図しない自動車の急加速や急停止などが引き起こされ、重大事故につながる可能性がある。
こうした事例に於いて、これまでの一般的な従来技術では、周期的に伝達される車載ネットワークのメッセージの間隔が許容範囲を外れているかどうかで攻撃メッセージを検知していた。
しかし実際のメッセージは、受信タイミングが揺らぐことがあるため、正規メッセージを攻撃メッセージと誤って検知し、その結果、スムーズな走行の妨害となる可能性があった。
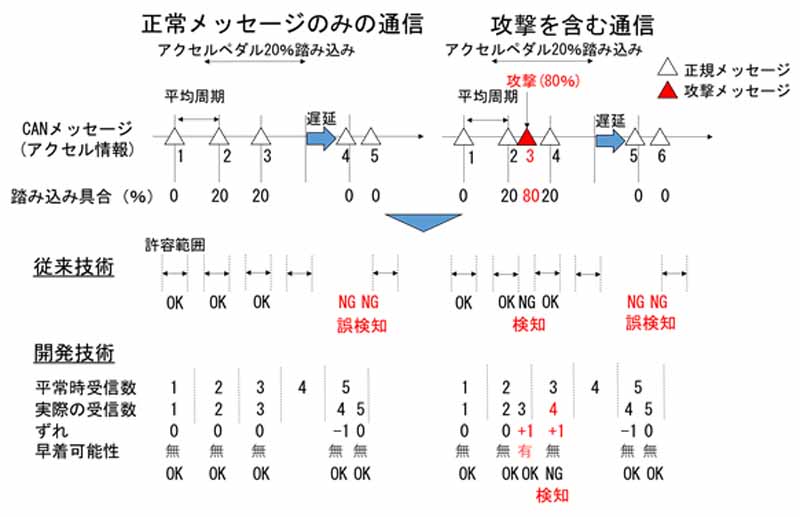
そこで富士通研究所では、平常時のメッセージの受信周期を学習し、学習した周期に対応するメッセージの受信数と実際の受信数のずれを利用して、攻撃の可能性を判定する新たなシステムを開発した。
具体的にはメッセージの平常時の周期による受信数と、実際に受信したメッセージの受信数を比較し、ずれの有無を検証。ずれがあった場合には、そのずれの情報を以降の周期に伝達することで、一時的なものなのか、攻撃によるものなのかを判断する。
実際の自動車で収録した600秒分のCANデータに対し、これまで知られている攻撃手法のメッセージを、様々なタイミングで注入した約1万パターンの疑似攻撃データにて評価したところ、最新技術では全ての攻撃を検知でき、かつ誤検知が発生しないことを確認できている。
この技術を活用することで、攻撃検知による確実な対策が可能となり、安全、かつ、スムーズな走行の実現を支援できる。また特異なずれが発生した場合、その後の受信メッセージのタイミングにより、検知結果を補正するため、誤って検知することなく、攻撃メッセージを検知することも可能となった。
なお同技術は、富士通株式会社が提供する「Mobility IoTプラットフォーム」を構成する要素として、2018年度での実用化を目指すとしている。