

株式会社日立製作所株式会社日立製作所(執行役社長兼COO:東原 敏昭/以下、日立製作所)は、ヒューマノイドロボット「EMIEW3」とリモートブレイン*1構成のロボットIT基盤を開発した。

「EMIEW3」は同社が先に開発していた「EMIEW2」の進化させたもので、店舗や公共施設において、サポートを必要とする顧客の元に自ら移動し、接客・案内サービスを行うことを目的に開発したヒューマノイドロボット。
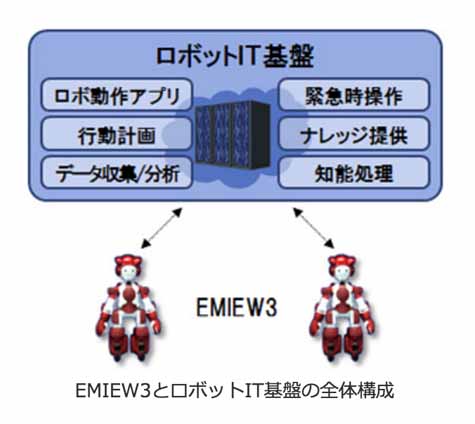
遠隔で音声・画像・言語処理などを行う知能処理システムと多拠点に配置された複数ロボットを監視・制御する運用監視システムからなるリモートブレイン構成のロボットIT基盤と連携することで、高度なサービスを行うことができると云う。
「EMIEW3」、ロボットIT基盤および開発者とオペレーターで構成するチームをひとつのパッケージとし、さまざまな場所や状況におけるロボットサービスの実証実験(PoC*2)を開始していくとしている。
日立は、豊かなコミュニケーション能力を持ち、人と安全に共存できるロボットサービスの実現を目指し、2005年に発表した「EMIEW」以来、人間と共生するロボットの開発を推進してきた。
2007年に発表した「EMIEW2」では、人の早足と同じくらいの速度で移動する自律走行機能や、雑音の中で人の声を聞きわける機能、Web上のデータを利用してモノを識別する機能、屋内に設置された複数のネットワークカメラを”目”としてモノを探し出す機能など、接客や案内サービスに必要とされる機能を開発し、実証してきた。
https://www.youtube.com/watch?v=Z8TI5u_MCu4
近年では、人工知能技術を活用し、言い回しの異なる質問へも適切に回答する対話機能や、死角から人が飛び出す危険を予測し回避する機能など、ロボットの知能処理の高度化も実現している。
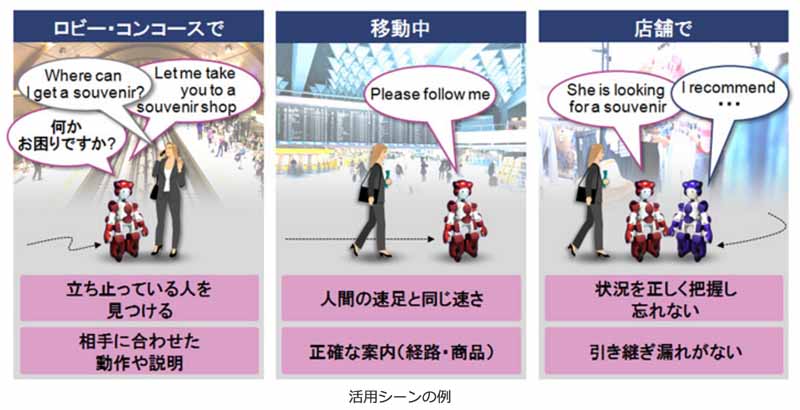
今回、日立が新たに開発した「EMIEW3」とロボットIT基盤は、「EMIEW2」で開発したさまざまな機能を継承しつつ、サポートを必要とするお客さまを見つけて自ら接客行動を開始する機能、複数台のロボット間での情報共有やサービスの引継ぎを行う機能、転倒しても自ら起き上がる機能を追加し、接客・案内サービスをより効果的に行う仕様を実現している。
「EMIEW3」とロボットIT基盤で実現した機能は以下の通り。
1. リモートブレイン構成に基づく知識処理で実現する高い能動性
音声・画像・言語処理などの知能処理をロボットの外側で行うリモートブレイン構成を採用し、高度な接客、案内サービスの提供を可能した。
人の動作やネットワークカメラとの連携による環境認識により、サポートを必要とする顧客を見つけて自ら接客行動を開始する。
また、街頭の雑音環境でも音声を認識して翻訳することにより、多くの観光客が訪日する社会において、顧客の業務を支援する。
2. ロボットのサービス稼働率を高める運用性
複数ロボットを遠隔から統合的に監視・制御する運用監視システムにより、多拠点に配置された複数台のロボット間での情報共有やサービスの引継ぎを可能とする。
また、ロボットの障害発生時には遠隔地から指示を出すことで短時間での復旧対応を実現し、サービス提供稼働を高める。
3. 多様なサービスに対応する機動性の高いロボットボディ
「EMIEW2」で開発した屋内サービスで実用的な身長90cm、重さ15kgの小型軽量ボディと、人と協調して移動できる最大移動速度6km/h、15mmの段差乗り上げ機能を継承するとともに、新たに、転倒からの起き上がり機能を搭載している。
日立は、「EMIEW3」とロボットIT基盤を活用し、顧客と共にロボットサービスの実証実験を開始する。
実証実験にあたっては、日立独自の顧客協創方法論「NEXPERIENCE」*3などを活用し、顧客と課題を共有し、共にソリューションをつくり上げる「協創」、世界のパートナーとのオープンイノベーションを通じて、ビジネスや社会の発展に役立つロボットサービスの実用化を目指す。
*1ロボット分野でよく用いられている手法。リアルタイム性が要求される処理は本体側で行い、要求されない処理は外部システムで担うもの。
*2Proof of Concept(概念実証)
*3「顧客協創手法」と「ツール」、それらを「実践する場」の3つを包含する日立オリジナルの顧客協創方法論
2015年10月15日ニュースリリース「社会イノベーション事業の加速に向けて、お客さまの課題をともに検討する顧客協創方法論「NEXPERIENCE」を構築」
http://www.hitachi.co.jp/New/cnews/month/2015/10/1015.html
関連情報
日立のロボティクスに関するWebサイト