
マツダ株式会社(本社:広島県安芸郡府中町、社長:小飼雅道 以下、マツダ)は4月20日、「平成29年度科学技術分野における文部科学大臣表彰」の「創意工夫功労者賞」を受賞した。
これはマツダの研究者5名が新世代4WDシステム「i-ACTIV AWD」(アイ・アクティブ・エイダブリュディー)の開発で「科学技術賞(開発部門)」に於いて、技術者1名が「車体シーラー塗布作業容易化装置の考案」に関わる「創意工夫功労者賞」を受賞したもの。
「科学技術賞(開発部門)」は、科学技術に関する研究開発、理解増進等において顕著な成果を収めた者に与えられるものであり、マツダの受賞は昨年の「i-ELOOP」(アイ・イーループ)、一昨年の「SKYACTIV-D」(スカイアクティブ ディー)に続き、今回が5回目となった。

また「創意工夫功労者賞」は、優れた創意工夫により職域に於ける技術の改善向上に貢献した者に与えられるもの。マツダからは主に生産現場における改善活動の成果などにより、平成27年以降3年連続の受賞となった。
今回、「科学技術賞(開発部門)」を受賞した「i-ACTIV AWD」は、走行中の路面状況やタイヤのスリップ予兆などをリアルタイムで検知し、電子制御で駆動力を積極的にコントロールし、走破性能と燃費性能を両立した新世代4WDシステムである。
2012年以降、「マツダ デミオ」「マツダ CX-3」「マツダ アクセラ」「マツダ CX-5」「マツダ アテンザ」の一部に採用されている。
また、「車体シーラー塗布作業容易化装置の考案」では、車体部品を接合するために欠かせないシーラーの塗布作業において、最小限でかつ安定してシーラーを送り出す装置を創意工夫し、生産効率の向上と品質の安定に貢献している。

【受賞概要】
科学技術賞(開発部門)
業績名:
「路面摩擦の変化に瞬時に対応する四輪駆動システムの開発」
受賞者:
– 土井 淳一、マツダ株式会社 ドライブトレイン開発部
– 松田 光伸、マツダ株式会社 ドライブトレイン開発部
– 八木 康、マツダ株式会社 ドライブトレイン開発部
– 丸谷 哲史、マツダ株式会社 ドライブトレイン開発部
– 三戸 英治、マツダ株式会社 ドライブトレイン開発部
創意工夫功労者賞
業績名: 「車体シーラー塗布作業容易化装置の考案」
受賞者:
石川 正隆、マツダ株式会社 防府工場
マツダでは、「今回の受賞を励みに、さらなる安全技術・環境技術の向上をめざした開発を継続し、走る歓びをお届けするとともに、より効率的で人に優しい工場へ飽くなき挑戦を続けることで、お客さまに選ばれ続けるオンリーワンのブランドになることを目指していきます」と結んでいる。
マツダの新世代4WDシステム「i-ACTIV AWD」の主な概要は以下の通り
マツダは、「i-ACTIV AWD」の開発にあたって、雨の高速道路や雪の坂道などのシーンを問わず、安心で快適、そして燃料消費も押さえる、新世代の4WDシステムを目指した。
具体的には、システムハードウェアとソフトウェアを全面的に見直し、電子制御で駆動力を積極的にコントロールすることで、走破性能と燃費効率をフルオートで高次元に両立させている。
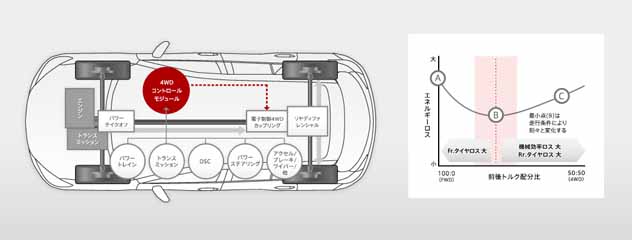
前後輪のトルク配分を自動制御
ドライバーが気づかないレベルのごくわずかなタイヤの動きや路面状況などをリアルタイムにモニターし、前後輪のトルク配分を2WD(FF)相当から直結4WD状態まで積極的にコントロール。走破性と操縦安定性をもたらし、タイヤの滑りを極力抑えることで、悪路でも効率のよい走りを目指している。

前後輪のトルク配分を自動制御
i-ACTIV AWDは、ドライバーの意図と路面状況と走行状況を多くのセンサーで正確に検知、必要な後輪トルクを瞬時に演算し、最適な駆動力を後輪に伝達。
前後・左右方向に車輪をスリップさせることなく、安定した発進・加速・旋回・制動を実現させる。
また、スリップしにくい乾いた路面では、不要な後輪トルクの伝達を抑え、ほぼ2WD状態で走行して燃費にも貢献する。
センサーで検知する要素
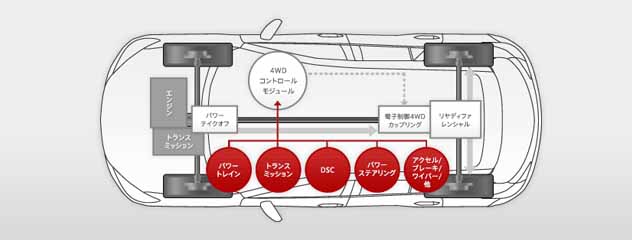
ドライバーの意図は、アクセルペダル位置(発進、加速意図)、ステアリング角度(旋回意図)、ブレーキ液圧(制動意図)で検知します。路面状況は、前後ワイパー(降雨、降雪)、外気温度(路面付近の温度)、ステアリングトルク・パワステモーター電流(ステアリング操作時の路面摩擦反力)、前後加速度(登坂路面勾配)で検知。
走行状況は、4輪車速度(4車輪のスリップ量やその予兆)、エンジン駆動力(前輪駆動力)を用いて正確に検知する。
必要な後輪トルクを瞬時に演算・指令
多数のセンサーモジュールによって検知したドライバーの走行意図と路面状況を解析し、前輪のスリップ予兆を打ち消すために必要な後輪トルク量を、4WDコントロールモジュールが瞬時に演算。ほぼ同時に適切な駆動力を後輪に伝達するよう、4WDカップリングに指令を送る。
i-ACTIV AWDに搭載された技術
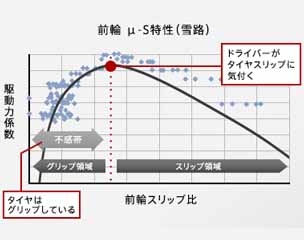 i-ACTIV AWDには、高精度な駆動力制御を実現する「前輪スリップ予兆検知システム」と、タイムラグ“ゼロ”のレスポンスを生む「トルク制御システム」を採用している。
i-ACTIV AWDには、高精度な駆動力制御を実現する「前輪スリップ予兆検知システム」と、タイムラグ“ゼロ”のレスポンスを生む「トルク制御システム」を採用している。
具体的には「前輪スリップ予兆検知システム」は、各種センサーにより、車体の対地速度と前輪速度を高精度で検出し、前輪の微小スリップ(空転の予兆)をいち早く察知。
 瞬時に適切な駆動力を後輪に配分することで前輪の空転を抑制するとともに、つねに理想的な前後トルク配分による効率のよい4WD走行を実現する。
瞬時に適切な駆動力を後輪に配分することで前輪の空転を抑制するとともに、つねに理想的な前後トルク配分による効率のよい4WD走行を実現する。
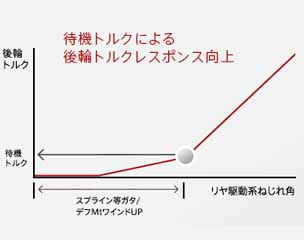
対して「トルク制御システム」は、後輪駆動ユニットの反応速度を高めるため、前輪のみの駆動時にも微小なトルクを後輪に伝達させたまま待機(待機トルク)。後輪トルク発生の指令に対して瞬時に反応できる状態を保持し、4WD走行へのスムーズな移行をサポートしていく。