
全日本スーパーフォーミュラ選手権で高精度位置情報の実証実験
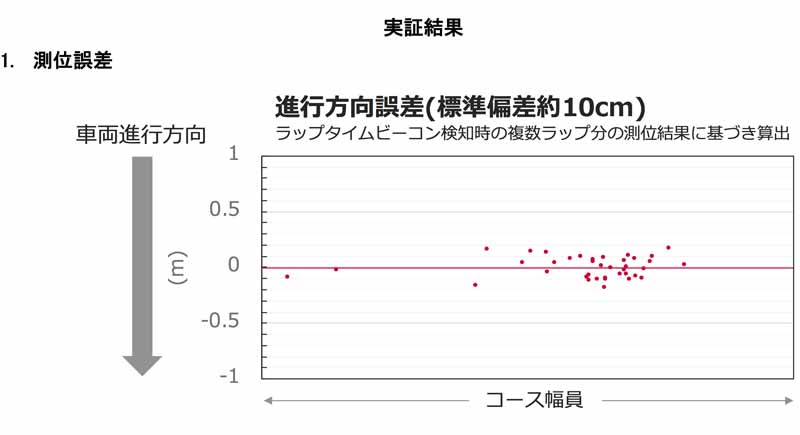
株式会社NTTドコモは12月4日から6日に掛けて行われた〝全日本スーパ ーフォーミュラ選手権(三重県・鈴鹿サーキット)〟を舞台に、高精度GNSS(ドコモIoT高精度GNSS位置情報サービス)を用いて、最高時速290kmで疾走する車両の測位誤差、約10センチの違いを捉えることに成功した。(坂上 賢治)
今後同社は、正確な車両位置の把握が必要となる自動車や鉄道に於ける自動運転を対象に、さらなる高精度測位技術の活用を目指すという。

ちなみに実証実験は、2020年全日本スーパ ーフォーミュラ選手権・第5戦&第6戦にあたる「第19回JAF鈴鹿グランプリ」で行われ、レーシングチーム「DOCOMO TEAM DANDELION RACING」と日本電信電話との共同体制で実施された。
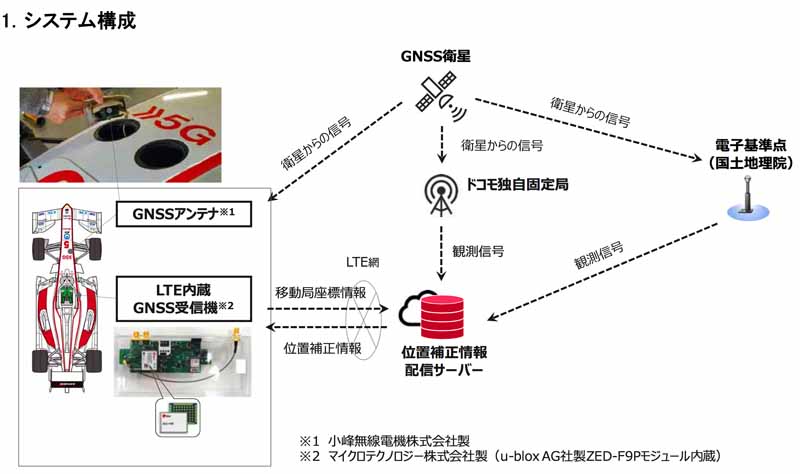
その概要は、測位衛星システムGNSS(Global Navigation Satellite System の略/GPS、GLONASS、Galileo、準天頂衛星・QZSSなどの衛星測位システムの総称)を活用したもの。このGNSSをLTE回線で接続した受信機を用意。
同受信機をレース走行中のフォーミュラカーに搭載し、高精度測位をリアルタイムで補足していくという実証実験を行った。こうした高速走行中のフォーミュラカーを用いた高精度測位実証は、国内での初(ドコモ調べ)となった。
より詳細には、鈴鹿サーキット内に設置したラップタイム計測用ビーコンの通過位置とGNSSによる測位結果を比較。この照らし合わせにより約10センチの誤差という緻密さで補足することに成功した。また全ての走行時間の約96%で高精度測位が可能であることも確認した。

昨今、交通社会で自動運転の実用化が求められているなか、高精度測位の需要が高まってきている。仮に高速移動での高精度測位が可能になれば、自動車や鉄道の自動運転で正確な車両位置を認識した上での車両制御が可能となる。
また対象車両が、線路・道路などの交通インフラを走行中でも、個々車両を精密に捉えて、その状態を克明に確認できるようになる。NTTドコモでは、今実証実験の結果を活かし、多様な環境下に於ける高精度測位の実用化を推し進めていく構えだ。

実証に参加したレーシングチーム「DOCOMO TEAM DANDELION RACING」の村岡潔氏は「これまでレース後のドライバーのコメントなどから、エンジニアが走行状態を想像しマシンの設定や調整をしていました。しかしドコモの高精度測位によりマシンの走行軌跡やスピードが可視化されることで、エンジニアのマシン設定や調整に非常に有効な技術になると思います。
またドライバー毎にコース取りかは微妙に違うため、 レース後にどちらのコース取りが良かったかなどドライバーへの気付きにもなると思います。今後、モータースポーツでドライバーのリアルな走行軌跡をファンが体感できるなどファンサービスの向上にも繫がると嬉しいです」と話している。
