
日立オートモティブシステムズ株式会社(社長執行役員&CEO:関 秀明/以下、日立オートモティブシステムズ)と株式会社日立ソリューションズ(取締役社長:柴原 節男/以下、日立ソリューションズ)は、自動運転車向けのアプリケーション開発を効率化する自動運転ECU(Electronic Control Unit:電子制御ユニット)プラットフォームを共同で開発した。
このプラットフォームは、共同開発したリアルタイムデータベースを搭載しており、これまで各アプリケーションが個別に処理・管理していたカメラやレーダーなどのセンサーデータや地図データを、データの種別に応じて整理することで、登録・検索時間を約10マイクロ秒(※1)(自社比1/100)に短縮し、高速なデータ処理・管理を可能にした。
また、リアルタイムデータベースがデータを一元管理するため、個別のアプリケーションのデータ管理機能を省くことができ、アプリケーションの開発効率が高まる。
加えて、本プラットフォームでは、専用のソフトウェア開発キット(SDK: Software Development Kit)を通じて、ECU上のアプリケーション開発や動作検証を汎用PC上で効率的に行うことができる。
この成果を踏まえて日立オートモティブシステムズは、2016年の年末から評価を実施し、2017年7月より新プラットフォームに基づく自動運転ECUとSDKを提供する予定としている。
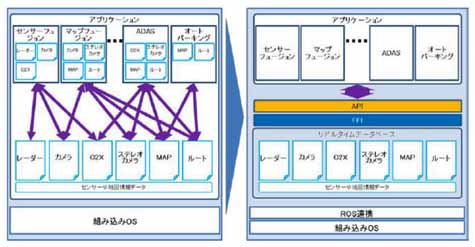
ちなみに、これまでのECUはアプリケーションごとにセンサー情報などのさまざまなデータを個別に処理・管理する構成が主流だった。
しかし、自動運転システムでは、車両に搭載されるセンサー数が多く、アプリケーションの機能もますます複雑化、大規模化していくと考えられ、大量のデータを複数のアプリケーションでリアルタイムに処理する必要があることに加え、アプリケーション同士の干渉や誤作動などへの対応も求められてきている。
また、アプリケーション機能の複雑化、大規模化に伴い、開発工数が急増しており、アプリケーションの開発効率の向上も課題となっている。
なお開発した本プラットフォームは、これらの課題に応えるため、以下の機能および開発環境を提供する。
(1)リアルタイムデータベース
本プラットフォームでは、日立オートモティブシステムズの自動運転システム開発技術と日立ソリューションズの組込み用データベース技術を融合させて構築した、自動運転システムのアプリケーションに最適化したリアルタイムデータベースを搭載している。
これまで、アプリケーションごとにデータ処理・管理のためのプログラムを組込む必要があったが、リアルタイムデータベースがその処理・管理を一元化するため、個別のアプリケーションのデータ管理機能を省くことができ、アプリケーションの開発効率を高めることができるようになった。
また、従来のデータベースのデータ登録・検索時間では、自動運転車両の制御で求められる高速な応答が困難だったが、今回開発したリアルタイムデータベースでは、データの種別に応じて整理することでデータ登録・検索時間を約10マイクロ秒に短縮し(自社比1/100)、高速な応答を実現する。
(2)ソフトウェア開発キット(SDK: Software Development Kit)
自動運転システム開発で広く利用されているROS(Robot Operating System)(※2)と連携動作するための機能を自動運転ECUに搭載している。
現在開発しているSDKは、ROSを通じてリアルタイムデータベースに格納されているセンサーデータなどを、リアルタイムに汎用PC上に可視化できる。
加えて、汎用PC上でアプリケーションの開発・動作検証や開発したアプリケーションのECUへの移植が容易に行うことができるため、開発の効率化に寄与する。
(3)FFI(Freedom From Interference)機能
ECU内で複数のアプリケーションが相互に干渉し、アプリケーションの停止や誤作動など、危険な状態に陥ることを防ぐため、自動車の機能安全国際規格(ISO 26262)で規定されているFFI機能を搭載している。
この機能は、各アプリケーションの実行時間をスケジューリングおよび監視し、相互に干渉することを防ぐことにより、各アプリケーションの独立実行を保証する機能となる。
これにより、アプリケーションが安定して安全に稼働する環境を実現していく。
(※1)1マイクロ秒=100万分の1秒
(※2)ロボット・アプリケーション制作を支援するオープンソースの開発キット(米Willow Garageが開発し、Open Source Robotics Foundationが維持・管理しているミドルウェア)。