

低速先導車追従走行(渋滞運転支援)を含む11種類の先進運転機能を、自動運転ECUに実装しテストコースで確認
日立オートモティブシステムズ株式会社(本社:東京都千代田区大手町、社長執行役員&CEO:関 秀明、以下、日立オートモティブシステムズ)は、自動運転ECU搭載車による先進運転機能を実証確認を行った。
具体的には、低速先導車追従走行(渋滞運転支援)を含む11種類の先進運転機能を実装した自動運転ECU(Electronic Control Unit:電子制御ユニット)を車両に搭載。
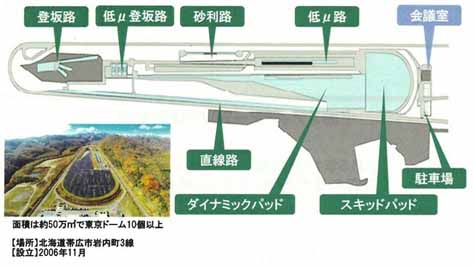
この車両を同社の十勝テストコースにおいて走行させて、全ての機能が正常に作動することを実証した。

同社では、今回の実証で得られたフィードバックを基に、さらなる改良を重ね、2017年7月に自動運転ECUの販売開始を目指す。
高速道での自動運転の実現には、自動運転ECUの制御による先導車追従走行ACC(Adaptive Cruise Control)や、車線維持システムLKS(Lane Keeping Assist System)をはじめとするさまざまな機能が必要であり、日立オートモティブシステムズでは、これまで自動運転ECUに8種類のアプリケーションを実装して機能することを実証してきた。
今回、新たに同社では、高速道での渋滞時の走行支援として、自動運転ECUの制御により、低速の先導車を追従走行する機能TJA(Traffic Jam Assist)、低速域の運転支援に有効なLSP(Low Speed Car Passing)や、ALC(Auto Lane Changing)のアプリケーションを開発。
これらすべてのアプリケーションを実装した自動運転ECUを車両に搭載し、日立オートモティブシステムズの十勝テストコースで車両を走行させたところ、全ての機能が正しく作動することを確認・実証した。
日立オートモティブシステムズが開発している自動運転ECUは、高速なデータ処理・管理が可能なリアルタイムデータベースを実装しており、自動運転システムに求められる高速な処理速度を実現する。
現在、さらなるプロトタイプのECUによる実証実験を重ねており、製品の販売開始は2017年7月を予定している。
同社では、これを踏まえ「今後も日立オートモティブシステムズは、自動車メーカーの先進安全運転技術搭載車両の開発や、普及に貢献していきます」とのコメントを出している。

自動運転ECU向けに開発したアプリケーション一覧は以下の通り
【2016年度に開発 (1)〜(3)】
(1)Traffic Jam Assist (TJA) ※渋滞時運転支援
高速道での渋滞時に低速先導車追従走行を行う機能。先導車を追従することで白線がない区間でも走行が可能なため、高速道の料金所前後など区間線がないところでも自動走行ができる機能を有している。
(2)Low Speed Car Passing (LSP) ※低速車追い越し
先行する低速車を自動で追い越す機能。高速道走行時に、自車の走行車線を先行する車両が、自車で設定した速度より低速で走行していることを認識すると、自動で追い越しを実施し、追い越しが完了し、安全が確認できた時点で元の車線に自動で戻る機能。
(3)Auto Lane Changing (ALC) ※自動車線変更(システム主導)
地図情報を用いて自動で車線を変更する機能。高速道走行時に、車線の減少や分岐情報などを地図情報から取得し、自車が走行するレーンと地図情報を照合することで、システムが自動で車線変更を実施する。
【2015年度に開発 (4)〜(6)】
(4)Driver Triggered Auto Lane Changing (DT-ALC) ※自動車線変更(運転者主導)
高速道走行時に、ドライバからの方向指示器入力により自動で車線変更を行う機能。
方向指示器が入力されると、システムは周囲の安全をセンサーなどで確認した上で車線変更を行う。
周辺に車両(障害物)等があり、安全に車線変更ができない場合には、車線変更は行われず、車線変更不可をドライバに知らせる。
(5)Intelligent Speed Adaption (ISA) ※速度適応制御
高速道に設置された速度標識を車両に搭載したステレオカメラで認識し、車両の加減速を自動で制御する機能。
車両のスピードが速度制限を下回っている場合は、速度標識を通過後に制限速度上限まで加速する。
また、カメラで認識した前方の速度標識の速度制限を、車両スピードが上回っていた場合は、速度標識に車両が到達するまでに加減速を行い、速度制限以内に制御する。
(6)Highway Pilot (HWP) ※高速道自動運転
ACCとLKSを連携させ、高速道路の同一車線で自動走行を行う機能。
【2014年度以前に開発(7)〜(11)】
(7)Blind Spot Warning System (BSW) ※ブラインドスポット検知システム
後側方レーダを用いて後方死角の車両(障害物)等を検出し、ドライバに通知する機能。
(8)Semi-Auto Parking (SAP) ※半自動駐車
駐車場所指定後、シフト操作を除き、システムが自動で駐車を行う機能。並列駐車、縦列駐車に対応する。
(9)Lane Keeping Assist System (LKS) ※車線維持システム
高速道走行時、ステレオカメラで白線を認識し、ステアリング制御により車線維持を行う機能。
(10)Autonomous Emergency Braking (AEB) ※自動緊急ブレーキ
ステレオカメラで前方障害物を認識し、ドライバへ警告音で通知すると共に、衝突の危険がある場合にはブレーキを制御して車両を減速・停止させる機能。
(11)Adaptive Cruise Control (ACC) ※先導車追従走行
高速道走行時、前方車両と一定の車間距離を維持しながら、設定された速度で走行を実現する機能。
会社概要:
日立オートモティブシステムズ株式会社
本社 :東京都千代田区大手町二丁目2番1号 新大手町ビル
事業内容 :自動車部品および産業用機械器具・システムの開発、製造、販売およびサービス