
 遠隔監視システム・乗客安全支援システムで、自動運転車の社会実装実現に貢献
遠隔監視システム・乗客安全支援システムで、自動運転車の社会実装実現に貢献
東海理化( 本社:愛知県丹羽郡大口町 代表取締役社長:二之夕裕美 )は1月16日、総務省の令和6年度補正予算「地域社会DX推進パッケージ事業( 自動運転レベル4検証タイプ )」に採択され、横浜市で実施される自動運転サービスの実証実験にコンソーシアムの1社として参画する。
なお上記コンソーシアムは8社で構成されており、NTTドコモビジネス、NTTアドバンステクノロジ、NTTデータ経営研究所、スタンレー電気、東海理化、ドコモ・テクノロジ、相鉄バス、先進モビリティの8社を指すもの。
実証実験の概要は、同市内の混雑発生地域・狭あい道路に於いて、自動運転レベル4に関わるローカル5G、路側インフラを活用した自動運転走行支援、無線環境最適化に伴う車内遠隔監視などの実証を行う。
そのなかで同社は遠隔監視システムと乗客安全支援システムを担い、安心安全な自動運転車の社会実装に向けた取り組みに貢献していくという。
その背景と概要は以下の通り
1.背景と目的
全国的にバス運転者不足や路線縮小が進行する中、横浜市内でも交通サービス維持で課題が浮上。例えば、よこはま動物園ズーラシア周辺では、休日の来園者による交通渋滞や入庫待ち車列が発生し、安全で効率的なバス運行を支える新たな交通モデルが求められてきている。
こうした背景を踏まえ、コンソーシアム関係各社は、通信制御(無線リソース最適化)と路 車協調(ローカル 5G・路側インフラ連携)を融合し、「都市部に於ける混雑発生地域や見通しの悪い狭あい道路でも安定して運行できる自動運転レベル4」の社会実装を目的とした検証を行う。
2.本実証の概要と検証内容
同実証は、総務省令和5年度補正予算「地域デジタル基盤活用推進事業(自動運転レベル4検証タイプ)」に採択され、昨年度実施した「よこはま動物園ズーラシア周辺での自動運転実証実験」を踏まえた 実証となる。
昨年度は、同園周辺往復約2km区間で小型自動運転車による通信切替制御と走行安全性を中心に検証したが、今年度は走行車両を2台にし、更に実証走行区間を相鉄本線鶴ケ峰駅からよこはま動物園北門までの往復約10.6kmに拡大した。
(2-1)走行中でも大容量データを安定して送受信できる通信環境の構築を実現
▷無線リソース最適化による車内遠隔監視の実現
Cradio(複数の無線ネットワークを連携させ最適な通信を維持できる「マルチ無線プロアクティブ制御技術」を指す)による無線通信電波品質予測とハンドオーバー制御で通信切断や劣化を最小限に抑え、ISAP(ネットワーク内で情報処理を分散・連携させて端末とクラウドの間で高速かつ効率的なサービス連携を実現する6G時代の通信・コンピューティング基盤技術)による通信量制御で映像遅延や画質劣化を抑える。
また、5Gワイド(混雑エリアや時間帯でも安定した通信の維持と通信速度の向上が図れるモバイルネットワークサービス)やネットワークスライシング(物理ネットワークを仮想的に分割して幅広いニーズに対応する技術)などの無線リソース最適化技術を適用し、都市部の変動する通信環境下でも車両制御に必要な情報を安定的に伝送できることを確認する。
▷監視員負担を考慮した効率的な運用の実現
docomo MEC®(データ処理をクラウドではなく通信網の近くで行うことで通信遅延を低減しセキュリティも確保する高められるドコモのエッジ型プラットフォーム)※9 上および遠隔監視装置でのリアルタイム映像処理により、バス車
内の状況を統合監視し、1 名の監視員で 2 台の車両を同時に遠隔監視可能な体制(1:2 遠隔監視) を構築。これにより監視業務の省人化・効率化を図るとともに、将来的な複数車両同時運 行モデルの実現性を検証する。
<通信環境イメージ>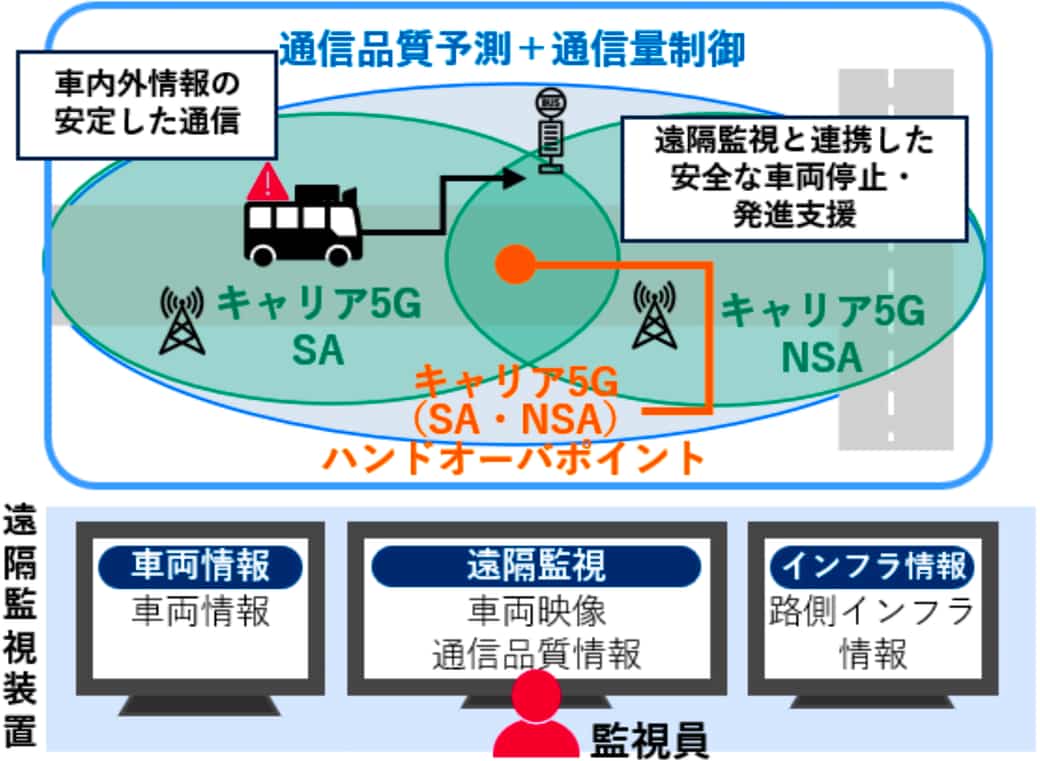
(2-2)狭あい道路や見通し不良区間に於ける安全かつ円滑な自動運転走行を支援する通信・制御基盤の構築
ローカル5Gサービス TypeD(ローカル5G/NTTドコモの通信設備を共用してローカル5Gネットワークを低コスト・省スペース構築できる冗長通信サービス)とキャリア5Gを併用。車両と路側インフラ(LiDAR・カメラ・スマート道路灯)との間で双方向通信を行う。
これらのセンサー情報をMEC上で統合・リアルタイム処理し、自動停止・減速・離合判断を車両制御に反映させることで、見通不良区間や狭い区間での安全通行を可能にする。また見通不良の交差点や駐車場出入口に於ける他車を即時に把握し、他車を回避する通行を可能にする。
更に昨年度は、通信品質の可視化や映像伝送の安定化を中心に検証を行ったが、今年は路側インフラ連携・車両間通信の統合制御にまで発展させ、都市部での自動運転に於ける路車協調制御技術の有効性を明らかにしていく。
上記を踏まえ東海理化が担う、より具体的な役割については以下の通り
遠隔監視システム
車両外に取り付けた複数台のカメラの映像を合成処理し、映像品質を維持したままリアルタイムに遠隔監視センターへ伝送。運行中の複数車両の走行状況や車内外の状況を1台のパソコンで一括監視するシステムを構築する。これにより監視者の負担が少ない安心・安全な遠隔監視システムの整備を担う。
乗客安全支援システム
画像認識技術を介して、乗客が走行中に席を立つなどの怪我につながるような不安全行動を検知し、自動運転車内に於ける安全をシステムを通じて支援する。

実証実験に使用される車両
・中型自動運転バス「ポンチョ」をベースとした車両を使用
・自動運転レベル2対応の日野自動車「ポンチョ」(試乗定員 10 名)2台
・各車両の撮影カメラ台数は以下の通り
– 車外7台(遠隔監視システムおよび乗客安全支援システム用途)
– 車内3台(遠隔監視システムおよび乗客安全支援システム用途)
<路側インフラ連携イメージ>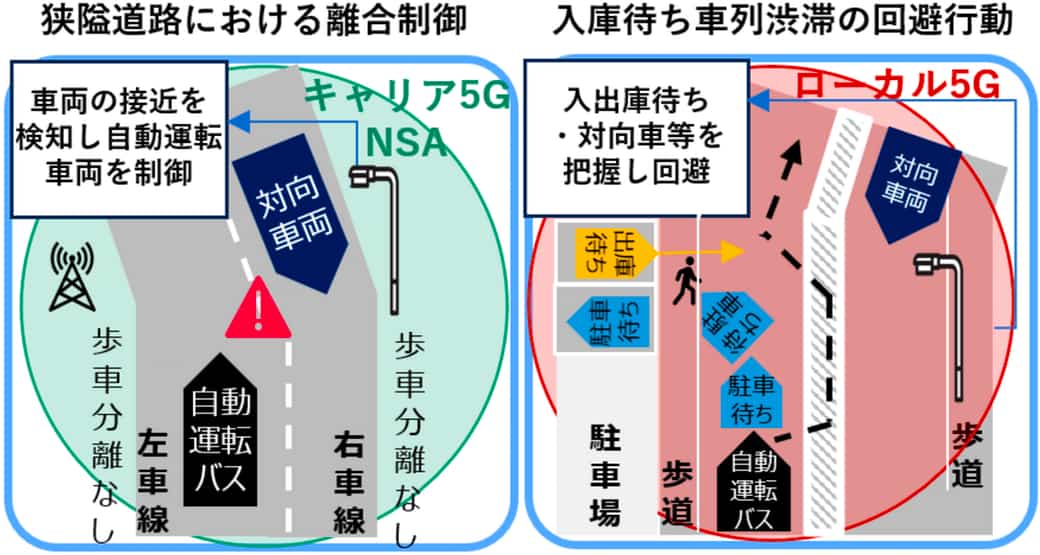
<運行ルート>
実施場所
神奈川県横浜市 相鉄本線鶴ケ峰駅~よこはま動物園北門(片道約 5.3km)
運行区間
相鉄本線鶴ケ峰駅~よこはま動物園ズーラシア
運行期間
2026 年 1/17~1/22(土日含む)
<一般試乗日は 1/17、1/18、1/21、1/22 の 4 日間となる>
乗車は、試乗専用乗車予約サイトからの事前予約制(乗車便により定員が異なる)
【往路:鶴ケ峰駅発→よこはま動物園着】 https://coubic.com/952e4759114ee1b8a52e/1605725![]()
【復路:よこはま動物園発→鶴ケ峰駅着】 https://coubic.com/952e4759114ee1b8a52e/1880389![]()
・時刻表等については事前情報を確認されたい。
・天候などの影響により手動運転への切り替えもしくは運休する場合がある。
3.今後の展開
同実証を通じて、都市部における自動運転バス運行の安定化・効率化に必要な通信制御および路車協調技術の有効性、および安全安心な監視業務のオペレーションを検証する。
そこから得られた知見は、横浜市のみならず、同様の交通課題を抱える他都市においても活用可能な知見として整理し、全国各地の都市型自動運転モデルの社会実装に向けて展開を図る。
また、同実証で活用していくローカル5G・Cradio・ISAP・MEC・5Gワイド・ネットワークスライシングといった先端通信基盤技術の活用は、将来の商用自動運転サービスに不可欠な技術要素であり、2027年度までに想定される全国展開フェーズに向けた重要な検証ステップと位置づけているという。
従って、これらの通信・制御技術を統合的に運用することで、遠隔監視・安全制御・データ利活用を一体化した持続可能な運行モデルの構築を目指すととている。
「ザ・イノベイター」車で世界を創った男たち (字幕版)

– 欧州で生まれ、アメリカの礎を築き、
日本の躍進を支えた自動車産業の歴史を辿る –
![]()