

自動車専用道路での合流、車線維持、レーンチェンジ、分流を自動運転
トヨタ自動車株式会社(本社 : 愛知県豊田市、社長 : 豊田章男、以下、トヨタ)は、2020年頃の実用化をめざし開発中の自動運転実験車(Highway Teammate)を使い、首都高速道路での合流、車線維持、レーンチェンジ、分流を自動運転で行うデモ走行を実施した。
またトヨタは、これまで取り組んできた自動運転の考え方を「Mobility Teammate Concept」と命名し、今後広く使用していく。
「Mobility Teammate Concept」とは、人とクルマが同じ目的で、ある時は見守り、ある時は助け合う、気持ちが通った仲間(パートナー)のような関係を築くトヨタ独自の自動運転の考え方である。
今回公開した「Highway Teammate」は、このコンセプトの具現化の第1弾となる。
(1)「Highway Teammate」
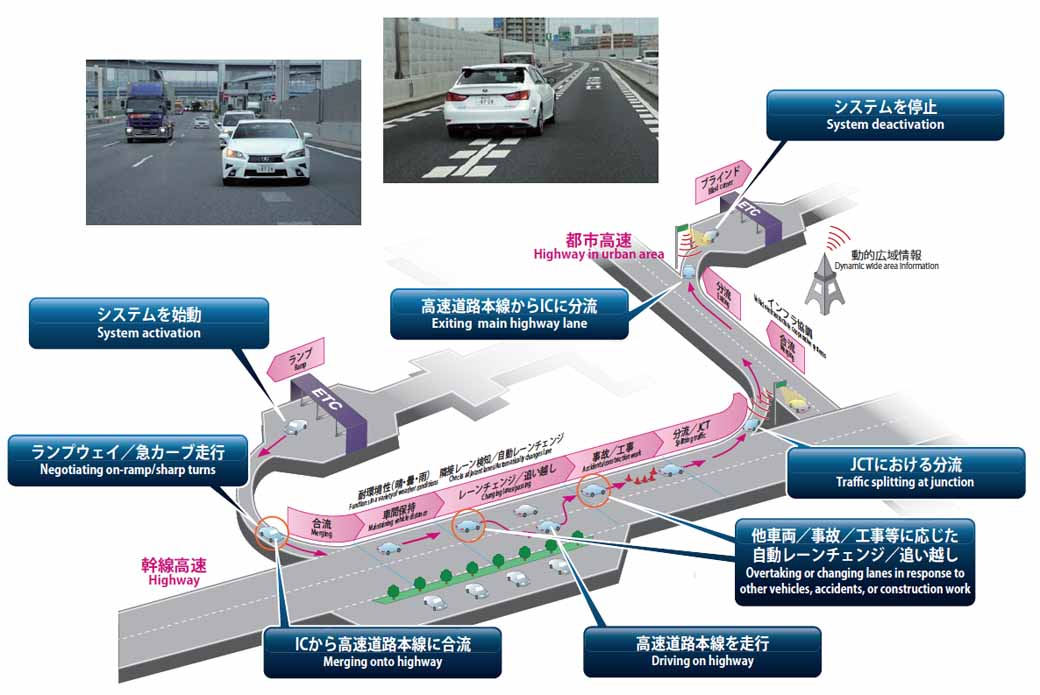
Lexus GSをベースに改造した「Highway Teammate」は、自動車専用道路において入口ランプウェイから出口ランプウェイまで自動走行することを可能としている。

実際の交通状況に応じて車載システムが適切に、認知・判断・操作することにより、自動車専用道路での合流、レーンチェンジ、車線・車間維持、分流などを実現した。
具体的には、ETCゲート通過後の入口ランプウェイ内において、ドライバーのスイッチ操作により自動運転に切り替え、自動走行を開始する。
車載システムは、高精度地図情報との照合により自車両の位置を高い精度で把握する。

また、周辺障害物や周辺車両の状況を、車両の各所に搭載した複数のセンサーにより認識し、目的地に応じたルート選択やレーン選択を行う。
これらの入力情報に基づき、「Highway Teammate」は、あたかも人が運転するかのように、走行ラインと目標速度を生成した上で、ハンドル、アクセル、ブレーキを自動で操作する。
これにより自動車専用道路でのジャンクションの分流、その後の合流、出口に向けたレーンチェンジ、車線・車間維持などを安全かつ、スムースに実現する。
「Highway Teammate」は自動運転における、3つの重要なプロセスである、認知・判断・操作を高い次元で行うことで、安全かつ、スムースな自動運転を実現している。

トヨタは、すべての人に安全でスムース、自由な移動を提供するため、「Highway Teammate」を2020年頃に実用化することを目標に、自動運転の研究開発を加速する。
(2)「Mobility Teammate Concept」
トヨタは自動運転技術の研究開発を、1990年代から取り組んできた。
その目的は、モビリティ社会の究極の願いである「交通事故死傷者ゼロ」への貢献と、高齢者や身体の不自由な方も含めた、すべての人に自由に移動できる手段を提供することである。
これまで取り組んできた、トヨタ独自の自動運転の考え方をこのたび「Mobility Teammate Concept」として発表した。

「Mobility Teammate Concept」とは、人とクルマが同じ目的で、ある時は見守り、ある時は助け合う、気持ちが通った仲間(パートナー)のような関係を築き、クルマを操る楽しさと自動運転を両立させるトヨタ独自の自動運転の考え方である。
ドライバーの状態や道路状況に応じて、クルマがドライバーの運転サポートや自動走行することで、すべての人が、「安全」、「スムース」、「自由」に移動できる社会の実現に貢献する。
トヨタは「Mobility Teammate Concept」を実現する重要な技術の柱として、
1.高度な認識・予測判断を行う「運転知能(Driving Intelligence)」。
2.車車間・路車間通信を活用し、安全運転を支援するITS Connectを始めとした「つながる(Connected Intelligence)」。
3.ドライバーの状態認識、ドライバーとクルマの運転の受け渡しなどを行う「人とクルマの協調(Interactive Intelligence)」という以上3つの領域を考えている。
トヨタはすべての人が、安全、スムース、自由に移動できる社会の実現を目指し、これらの自動運転技術の開発を強化していく。